Connector Validation in Robotics: Adapting Test Strategies to Dynamic Operating Conditions
As robotics systems become more dynamic, compact, and application-specific, interconnect reliability is emerging as a critical factor in overall system performance. Connectors in robotic platforms are exposed to continuous motion, high mating cycles, and complex environmental conditions, making conventional validation approaches insufficient in some cases.
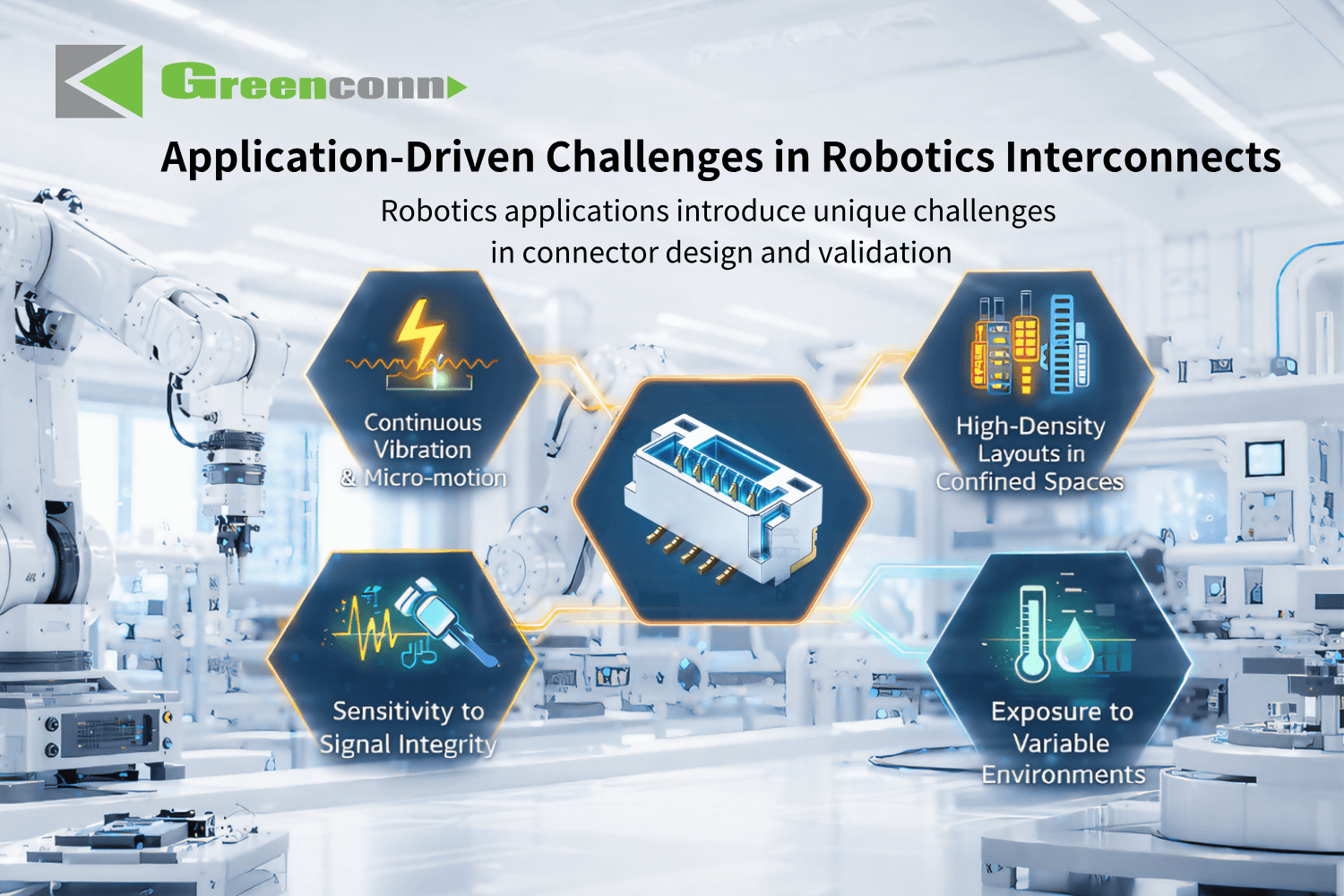
Robotics applications introduce unique challenges in connector design and validation
Understanding how operating conditions influence connector performance is essential to defining effective validation strategies.
1. Application-Driven Challenges in Robotics Interconnects
Robotics applications introduce a set of constraints that differ significantly from traditional industrial systems. Multi-axis motion, compact architectures, and real-time control requirements all place additional demands on connector performance.
Key challenges include:
- Continuous vibration and micro-motion, leading to fretting and unstable contact interfaces
- High-density layouts in confined spaces, increasing design and assembly complexity
- Sensitivity to signal integrity in control and feedback systems
- Exposure to variable environments in mobile platforms such as AGVs and AMRs
These factors result in more complex failure modes and require validation approaches that go beyond standard qualification tests.
Application-specifc operating conditions define connector validation priorities in robotics
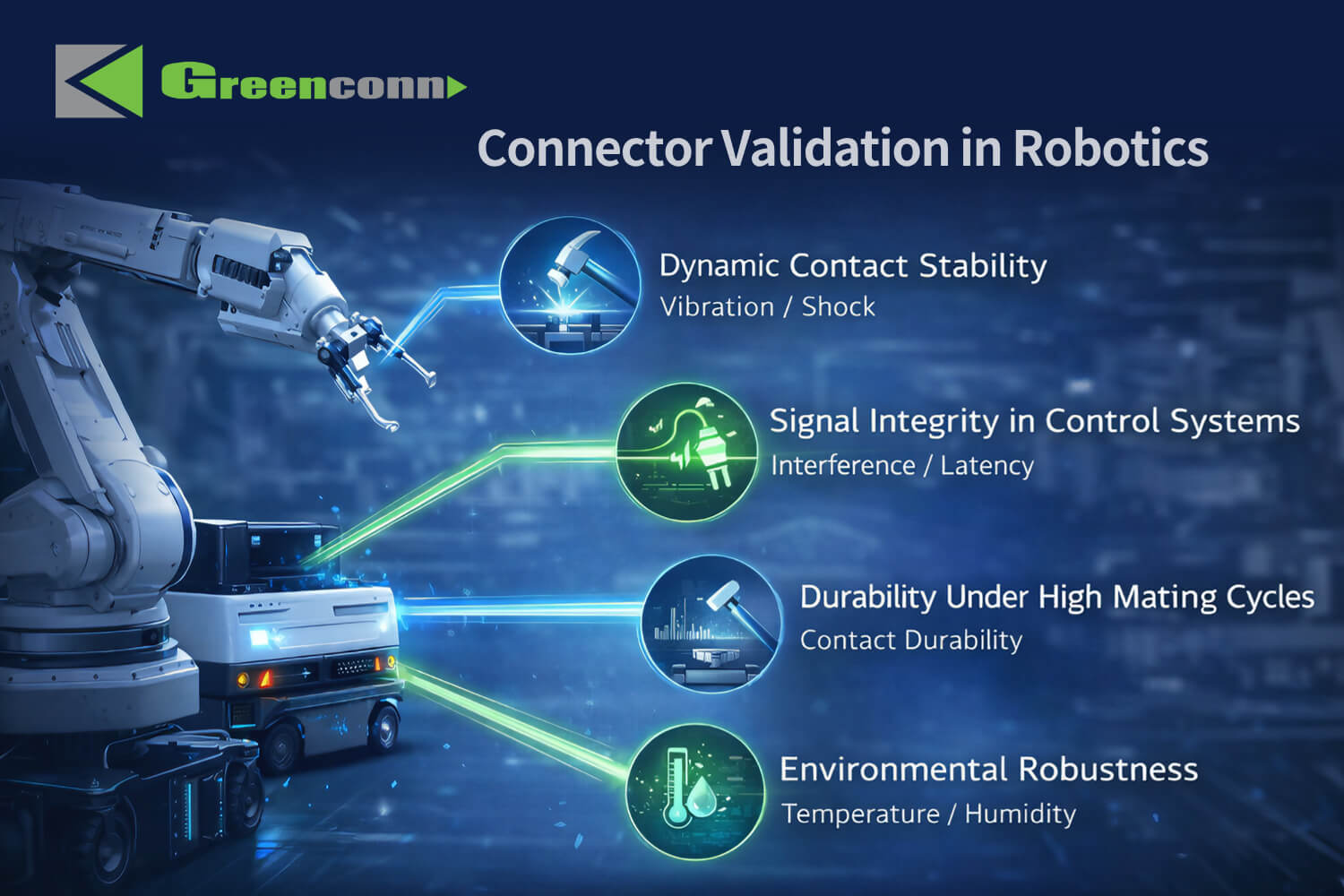
2. Key Connector Validation Focus Under Robotic Operating Conditions
In robotics, connector validation must reflect real operating conditions rather than isolated test metrics. Several aspects become particularly critical:
Dynamic Contact Stability
Under continuous motion, connectors must maintain stable electrical contact. Vibration and shock testing are therefore used not only to verify mechanical robustness, but also to assess the risk of intermittent disconnection.
Signal Integrity in Control Systems
Robotic control relies on precise and real-time data transmission. Impedance control and signal transmission testing help ensure low latency and resistance to electromagnetic interference.
Durability Under High Mating Cycles
Frequent maintenance and modular design increase mating cycles. Testing must evaluate long-term contact performance and mechanical retention after repeated use.
Environmental Robustness
Thermal cycling, humidity exposure, and corrosion testing are used to validate performance stability under varying environmental conditions, particularly for mobile or semi-outdoor systems.
3. From Standard Testing to Application-Oriented Connector Validation
To address these challenges, validation strategies are increasingly combining standardized test methods with application-specific simulation.
This includes:
- Introducing multi-axis or combined vibration profiles to better replicate robotic motion
- Applying coupled environmental stresses, such as temperature and humidity alongside mechanical loading
- Monitoring contact resistance and signal behavior under dynamic conditions
- Using multi-cycle testing and data analysis to improve consistency and traceability
In practice, this approach shifts validation from isolated testing toward a more system-level understanding of connector performance.

Validation Methods for Dynamic Robotic Operating Conditions
Greenconn, for example, applies application-oriented validation methods in its connector development process, integrating laboratory testing with real-world condition simulation to support robotics and industrial automation applications.
As robotics applications continue to expand across industrial, logistics, and service domains, connector validation is evolving from a standardized process to a more application-driven discipline.
By aligning test strategies with actual operating conditions, engineers can better anticipate failure risks and ensure stable power and signal transmission in increasingly complex robotic systems.

