
Connectors in Robotic Systems: Engineering the Interconnect Between Sensing, Control, and Power
In robotic systems, algorithms and software define how decisions are made—but hardware interconnection determines how effectively those decisions are executed.
As a critical link running throughout the entire system, connectors are responsible for data transmission, signal control, and power delivery. Their performance directly impacts operational stability, response accuracy, and overall system reliability.
Connectors: The Engineering Interconnect Across Robotic Systems
1. Connectivity Requirements Across Different Robot Types
As robotic systems continue to evolve toward higher integration and functional complexity, different robot categories impose distinct demands on connector reliability, assembly flexibility, and electrical performance.
· Industrial Robots
Designed for continuous operation under high loads, these systems require stable power delivery, strong vibration resistance, and effective EMI protection to ensure reliable multi-axis control.
· Bionic Robots
With compact structures and a high degree of freedom, connectivity is concentrated around joint actuation and sensing modules. This drives demand for miniaturized, high-density interconnects capable of supporting high-speed signal transmission.
· Service Robots
Focused on human–machine interaction and intelligent perception, service robots integrate multiple sensors and communication modules. Connectors must balance stability and safety within limited internal space.
· Collaborative Robots (Cobots)
Emphasizing flexible deployment and human collaboration, cobots require connectors that support fast assembly and maintenance while maintaining long-term stability under frequent motion.
· Autonomous Mobile Robots (AMR / AGV)
Operating in continuous motion and vibration environments, these platforms place higher requirements on the continuity and reliability of both power and control signal transmission.
2. Connectivity Needs in Key Robotic Structures
From a system-level perspective, robotic interconnection requirements are primarily concentrated in joint modules, control systems, and mobile actuation units. Other elements—such as sensor assemblies, end effectors, and internal wiring—are typically integrated as part of or extensions to these core structures.
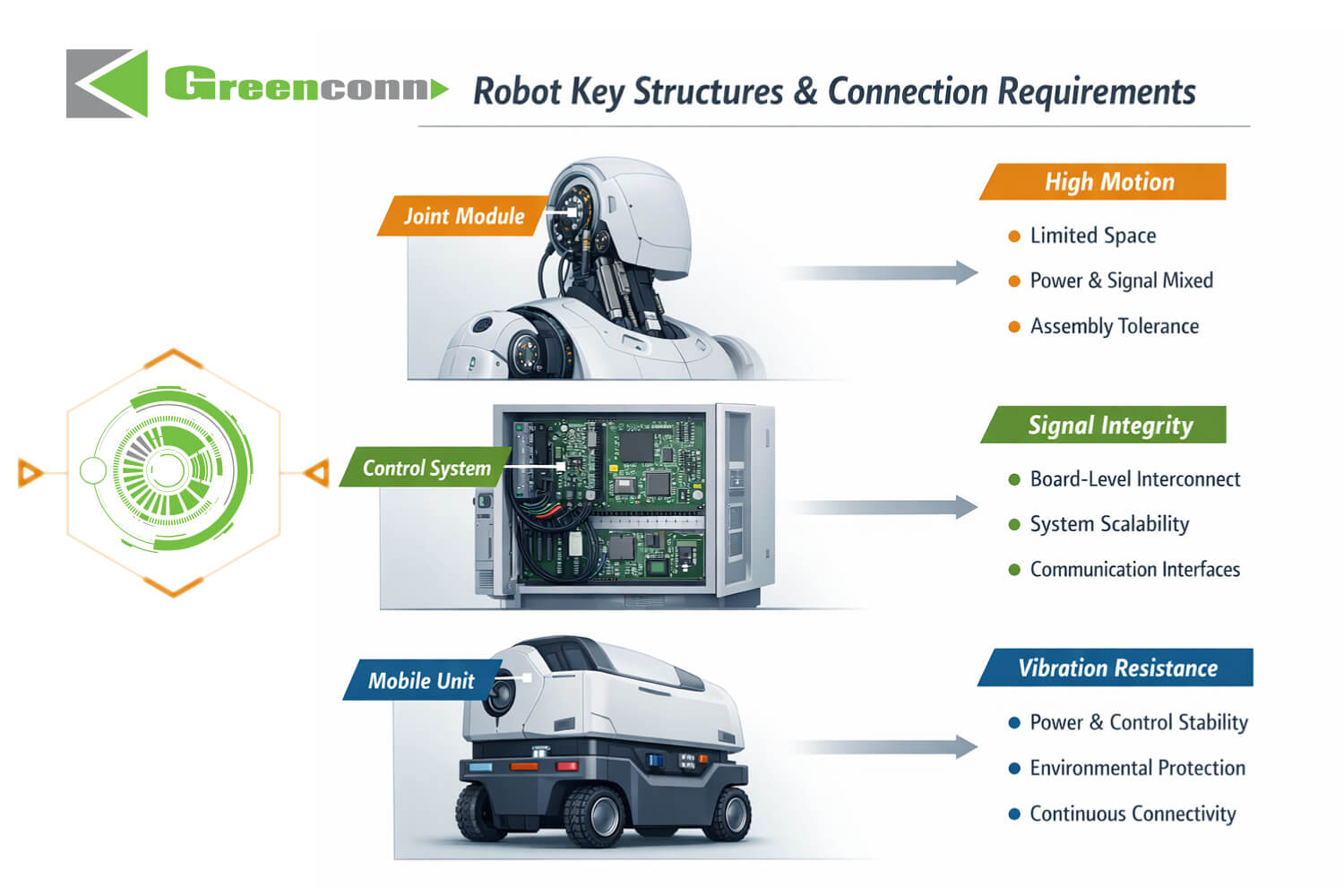
Robot Key Structures & Connection Requirements
Because these areas differ significantly in space constraints, motion characteristics, signal types, and environmental exposure, the key challenge is not the connector category itself, but whether the interconnection capability aligns with real-world engineering conditions.
Joint Modules: Stable Connectivity Under Continuous Motion
Joint modules are among the most space-constrained and mechanically active areas of a robot. Connectors must tolerate assembly misalignment, support reliable power and signal transmission in compact layouts, and maintain stable contact under repeated movement.
Control Systems: Signal Integrity and Scalability
Control cabinets and controller boards handle signal processing and logic control. Interconnect solutions must ensure stable board-level connections, preserve sensitive signal integrity, and support industrial communication interfaces and system expansion.
Mobile Actuation Units: Reliability in Dynamic Environments
Within mobile bases and drive units, connectors are exposed to sustained vibration and motion. Key considerations include secure power and control connections, transmission continuity, and appropriate environmental resistance.
3. Greenconn’s Engineering Support for Robotic Interconnection
Addressing the connectivity demands of joint motion, control processing, and mobile actuation, Greenconn provides a range of proven interconnection solutions to support diverse robotic system architectures.
These solutions are applicable to board-level interconnects, mixed power-and-signal transmission, high-density layouts, and applications requiring environmental adaptability—helping improve assembly consistency, long-term operational stability, and system-level integration.
Final connector selection and implementation should be evaluated based on robot type, operating conditions, and system architecture. Interconnection methods and technical approaches can be flexibly adapted to specific application requirements.
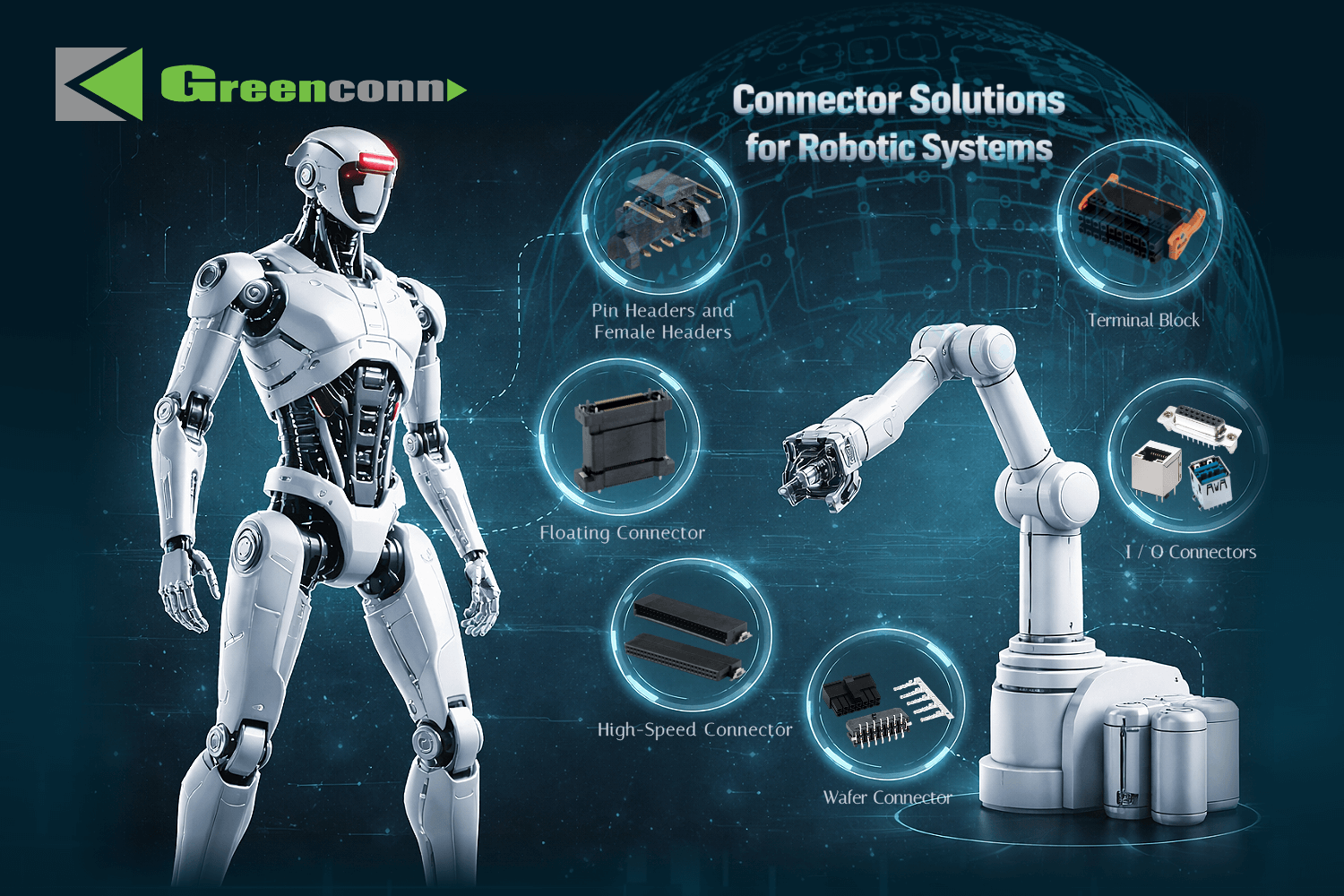
Connector Solutions for Robotic Systems
4. Evolving Trends in Robotic Connector Design
As robotic systems advance toward higher performance and greater integration, connector engineering requirements continue to evolve:
· Reliability with Low Latency
Supporting stable, real-time signal transmission for motion control and feedback systems.
· High-Speed Data and High-Current Power in Parallel
Enabling integrated transmission of power and signals within a single interconnection architecture.
· High Density and Miniaturization
Accommodating compact joint structures and space-limited internal layouts.
· System-Level Reliability Optimization
Enhancing overall system efficiency while reducing assembly and maintenance complexity.
In response to the ongoing evolution of the robotics industry, Greenconn continues to focus on engineering reliability—optimizing high-speed, high-current, and high-density interconnection solutions to provide a stable and efficient connectivity foundation for next-generation robotic systems.

